
Mars 3 - Mars 3
 Mars 3 Orbiter
| |
| Görev türü | yörünge ve iniş aracı |
|---|---|
| Şebeke |
|
| COSPAR Kimliği | Orbiter: 1971-049A Lander: 1971-049C |
| SATCAT no. | Orbiter: 5252 Lander: 5667 |
| Görev süresi | Orbiter: 452 gün |
| Uzay aracı özellikleri | |
| Kitle başlatın | Orbiter: 3.440 kg (7.580 lb) Lander: 1.210 kg (2.670 lb) |
| Görev başlangıcı | |
| Lansman tarihi | 28 Mayıs 1971 15:26:30 (UTC) |
| Roket | Blok D üst kademe ile Proton-K |
| Görev sonu | |
| Bertaraf | Hizmetten çıkarıldı |
| Devre dışı bırakıldı | 22 Ağustos 1972 (yörünge aracı) |
| Son temas | Son veri iletimi Temmuz 1972 |
| Yörünge parametreleri | |
| Referans sistemi | Areosentrik |
| Mars yörünge aracı | |
| Orbital yerleştirme | 2 Aralık 1971 |
| Yörünge parametreleri | |
| Çevre alanı yüksekliği | 1.500 km (930 mil) |
| Apoareion irtifa | 211.400 km (131.400 mil) |
| Eğim | 60 ° |
| Mars iniş | |
| Uzay aracı bileşeni | Mars 3 Lander |
| İniş tarihi | 2 Aralık 1971 (11 Terazi 192 Darian ) 13:52 UTC SCET ( MSD 34809 03:06 AMT ) |
| İniş Yeri | 45 ° G 202 ° D / 45 ° G 202 ° D (tahmin edilen) |
Mars 3 robotik oldu uzay sondası arasında Sovyet Mars programında dokuz gün onun ikiz uzay aracı sonra May 28, 1971, başlatılan Mars 2 . Sondalar , her biri bir yörünge ve bağlı bir iniş aracından oluşan Blok D üst aşamasına sahip Proton-K roketleri tarafından fırlatılan aynı robotik uzay aracıydı . Mars 2 iniş aracının Mars yüzeyine düşmesinden sonra, Mars 3 iniş aracı 2 Aralık 1971'de Mars'a yumuşak bir iniş yapan ilk uzay aracı oldu. İnişten 110 saniye sonra başarısız oldu ve sadece hiçbir ayrıntı içermeyen gri bir görüntü iletti. Mars 2 yörünge aracı ve Mars 3 yörünge aracı, sekiz ay boyunca Mars'ı çevrelemeye ve görüntüleri Dünya'ya geri göndermeye devam etti.
Genel Bakış
- Başlatma Tarihi / Saati:
- Mars 3: 28 Mayıs 1971, 15:26:30 UTC
- Fırlatma kütlesi (yakıt dahil):
- Birleşik: 4.650 kg (10.250 lb)
- Yörünge: 3.440 kg (7.580 lb)
- Lander: 1.210 kg (2.670 lb)
- Yörüngede kuru kütle: 2.265 kg (4.993 lb)
- Boyutlar: 4,1 m (13,5 ft) yüksekliğinde, 2 m (6,6 ft) eninde (5,9 m (19,4 ft) güneş panelleri ile birlikte)
Orbiter
4M-V yörünge aracının temel amacı, Mars yüzeyinin topografyasını incelemekti; toprak bileşimini analiz etmek; atmosferin çeşitli özelliklerini ölçün; "güneş radyasyonu, güneş rüzgarı ve gezegenler arası ve Mars manyetik alanları" nı izlemek. Ek olarak, "karadan Dünya'ya sinyal göndermek için bir iletişim rölesi" olarak hizmet etti.
Yörünge aracı kısmi bir yakıt kaybından muzdaripti ve kendisini 25 saatlik planlı bir yörüngeye sokacak kadar yeterli gücü yoktu. Bunun yerine motor, uzay aracını Mars çevresinde oldukça eliptik uzun bir döneme (12 gün, 19 saat) yerleştirmek için kesilmiş bir yanma gerçekleştirdi.
Tesadüfen, Mars'taki özellikle büyük bir toz fırtınası görevi olumsuz yönde etkiledi. Mariner 9 , Mars 2 ve Mars 3'ten sadece iki hafta önce, 14 Kasım 1971'de Mars'a ulaştığında ve başarıyla Mars'ın yörüngesine girdiğinde , gezegensel bilim adamları atmosferin " şimdiye kadar gözlemlenen en büyük fırtına olan gezegen çapında bir toz cüppesi ile kalın" olduğunu görünce şaşırdılar. ". Yüzey tamamen gizlenmişti. Görev bilgisayarlarını yeniden programlayamayan hem Mars 2 hem de Mars 3, iniş takımlarını hemen gönderdiler ve yörüngeler, mevcut veri kaynaklarının önemli bir bölümünü özelliksiz toz bulutlarının görüntülerini yakalamak için kullandılar.
Mars 3 yörünge aracı, yayınlar Ağustos ayına kadar devam etse de, Aralık 1971'den Mart 1972'ye kadar olan dönemi kapsayan verileri geri gönderdi. Mars 3'ün 20 yörüngeden sonra 22 Ağustos 1972'de görevini tamamladığı açıklandı. Sonda, Mars 2 ile birlikte toplam 60 resim gönderdi. Görüntüler ve veriler, 22 km'ye varan dağları, üst atmosferdeki atomik hidrojen ve oksijeni, -110 ° C ile +13 ° C arasında değişen yüzey sıcaklıklarını, 5.5 ile 6 mb arasında değişen yüzey basınçlarını, su buharı konsantrasyonlarının 5000 kat daha düşük olduğunu ortaya çıkardı. Dünya atmosferinde, 80 ila 110 km yükseklikte başlayan iyonosferin tabanı ve atmosferdeki 7 km yüksekliğindeki toz fırtınalarından gelen tahıllar. Görüntüler ve veriler yüzey kabartma haritalarının oluşturulmasını sağladı ve Mars'ın yerçekimi ve manyetik alanlar hakkında bilgi verdi .
Lander

Lander uzay aracı sistemi
Mars 3 iniş modülü, tahrik sisteminin karşısındaki otobüs / yörüngeye monte edildi. Küresel 1.2 m çapında iniş kapsülü, 2.9 m çapında konik aerodinamik fren kalkanı, paraşüt sistemi ve retro roketlerden oluşuyordu.
İniş modülünün tamamı 1210 kg'lık yakıt doldurulmuş bir kütleye sahipti, küresel iniş kapsülü bunun 358 kg'ını oluşturuyordu. Gaz mikro motorları ve basınçlı nitrojen kaplarından oluşan otomatik bir kontrol sistemi, tutum kontrolü sağladı. Eğim ve sapmayı kontrol etmek için koninin dış kenarına dört katı yakıt motoru monte edildi.
Lander'ın üst kısmına ana ve yardımcı paraşütler, inişi başlatacak motor ve radar altimetre monte edildi. İniş modülü içindeki şoku emmek için köpük kullanılmıştır. İniş kapsülünün, yere indikten sonra açılarak uzay aracını düzelten ve enstrümantasyonu açığa çıkaran dört üçgen yaprağı vardı.
Lander, yüzeyin 360 derecelik görüntüsüne sahip iki televizyon kamerası ve atmosferik bileşimi incelemek için bir kütle spektrometresi ile donatılmıştı; sıcaklık, basınç ve rüzgar sensörleri; organik malzemeleri ve yaşam belirtilerini aramak için mekanik bir kepçe dahil olmak üzere yüzeyin mekanik ve kimyasal özelliklerini ölçen cihazlar. Ayrıca Sovyet arması ile bir flama içeriyordu.
Yerleşik bir radyo sistemi aracılığıyla yörünge aracı ile iletişim sağlamak için kürenin tepesinden dört anten çıkıntı yaptı. Ekipman, ayrılmadan önce yörünge aracı tarafından şarj edilen pillerle çalıştırıldı. Isı yalıtımı ve bir radyatör sistemi ile sıcaklık kontrolü sağlandı. İniş kapsülü, Mars ortamının kirlenmesini önlemek için fırlatılmadan önce sterilize edildi.
Prop-M Rover

Mars için Pasiflik Tahmin Aracı olarak adlandırılan Mars 3 Lander, Alexander Kemurdzhian liderliğindeki yaklaşık 150 mühendisten oluşan bir ekip tarafından Mobil Araç Mühendisliği Enstitüsünde tasarlandı ve üretildi . Aracın üzerinde, karaya 15 metrelik bir göbek kablosuyla bağlıyken kayaklar üzerinde yüzey boyunca hareket etmesi planlanan küçük bir ' Mars gezgini ' vardı . Otonom engellerden kaçınma için iki küçük metal çubuk kullanıldı, çünkü Dünya'dan gelen radyo sinyallerinin uzaktan kumandayı kullanarak gezgini sürmesi çok uzun sürecek. Gezici, dinamik bir penetrometre ve bir gama ışını dansitometresi taşıyordu .
Ana PROP-M çerçevesi, ortasında küçük bir çıkıntı bulunan 4,5 kg (9,9 Lb) bir çömelme kutusuydu (25 cm x 22 cm x 4 cm). Çerçeve, her iki taraftan aşağı doğru uzanan ve çerçeveyi yüzeyin biraz üzerinde yükselten iki geniş düz kayak üzerinde desteklenmiştir. Kutunun önünde engel tespit çubukları vardı. Gezici, bir manipülatör kolu ile indikten sonra yüzeye yerleştirilerek, televizyon kameralarının görüş alanında hareket etmesi ve her 1,5 metrede bir ölçüm yapmak için durması planlandı. İletişim kaybı nedeniyle PROP-M gezgininin konuşlandırılıp konuşlandırılmadığı bilinmemektedir.
PROP-M gezgininin hareket halindeki bir animasyonu şu adreste mevcuttur: Mars 3 Rover animasyonu
Giriş, iniş, iniş, iletim ve arıza
Mars 3'ün iniş modülü 2 Aralık 1971'de UT 09: 14'te, Mars'a ulaşmadan 4 saat 35 dakika önce yayınlandı. İniş modülü , Mars atmosferine yaklaşık 5,7 km / s hızla girdi . Sayesinde aerodinamik fren , paraşüt ve retrorockets , uzay aracı bir yumuşak inişi elde 45 ° S 202 ° D / 45 ° G 202 ° D Koordinatlar : 45 ° S 202 ° D / 45 ° G 202 ° D ve açıldı.
İnişten 90 saniye sonra, uzay aracı Mars 3 yörüngesine sinyal göndermeye başladı. 20 saniye sonra, bilinmeyen nedenlerle iletim durdu. Arızanın yer aracından mı yoksa yörünge aracı üzerindeki iletişim rölesinden mi kaynaklandığı bilinmemektedir. Başarısızlığın nedeni, o sırada meydana gelen ve iletişim sistemine zarar veren bir koronal boşalmaya neden olabilecek son derece güçlü Marslı toz fırtınasıyla ilgili olabilir . Toz fırtınası, zayıf görüntü aydınlatmasını da açıklayabilir.
Kısmi bir görüntü (70 satır) iletildi. Mars keşfinin ilk günlerinde Lavochkin tasarım bürosunda Mars ve Venüs uzay aracının baş tasarımcısı VG Perminov'a göre, görüntü "ayrıntı içermeyen gri bir arka plan" idi.
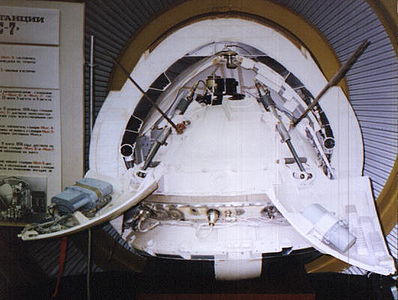
NPO Lavochkin Müzesi'ndeki Mars 3 Lander'ın kesit görüntüsü.

Mars'a iniş yapmanın olası görüntüleri
11 Nisan 2013'te NASA, Mars Keşif Orbiterinin (MRO) Mars yüzeyinde Mars 3 uzay aracı donanımını görüntülemiş olabileceğini duyurdu . Hirıse MRO kamera olabilecek görüntülerini aldı paraşüt , retrorockets , ısı kalkanı ve Lander . Bu keşif, kamuya açık arşivlenmiş görüntülere bakan amatör uzay meraklıları tarafından yapıldı.

Ayrıca bakınız
Referanslar
Dış bağlantılar
- NASA'nın Mars araştırması web sitesi
- "Mars'a Giden Zor Yol", VG Perminov
- Mars-3'teki Lavochkin sayfası (Rusça)
- Ted Stryk'in Mars 3 Sondası hakkındaki sayfası
- Mars-3 inişinde TASS bildirimi (Rusça) ( Wikisource )
- Larry Klaes - EJASA Ekim 1989
- M71 misyonu hakkında Sovyet belgeseli (1971-1973) (Youtube, İngilizce altyazılı)
- Sovyet Mars Sondası görüntülerinin kataloğu
